
Le vélo électrique : un langage précis
W, Wh, Ah, U, I, N.m , que de termes compliqués à appréhender dans le monde du vélo électrique alors qu’avec un vélo musculaire, le seul paramètre important était la force (en Newton) développer dans ses jambes qui donnait un couple en Nm, Newton mètre .
Avec l’arrivée du VAE, une multitude de terme plus ou moins compréhensible est apparue et tout le monde y a va de son explication, « quelle ampérage ta batterie ? », « ton moteur n’est pas un 250 Wh »? Ta batterie a une autonomie de 20A ?
Nous allons vous expliquer dans la suite de cet article le langage du vélo électrique, les bons termes à utiliser et surtout leur explication.
Commençons par quelques rappels fondamentaux et des unités de mesures utilisées pour le vélo électrique, valable aussi pour les motos, voitures électriques, quad électriques, trottinettes électriques, etc.
Caractéristiques d’un moteur
La loi d’Ohm
Le langage autour du vélo électrique tel que la tension est obtenu grâce à la loi d’Ohm.
Loi d’Ohm : U = R x I
- U représente la tension exprimée en Volt (V), la dénomination souvent utilisée « Voltage » ne correspond à aucun terme scientifique en français mais en anglais.
- R représente la résistance exprimée en Ohm (Ω)
- I représente l’intensité exprimée en Ampère (A), même si vous trouvez beaucoup d’articles avec le terme ampérage, sachez que cette dénomination de veut rien dire.
Autre écriture de la loi d’Ohm : P = U x I
- P représente la puissance électrique en Watt en régime continu (W)
- U représente la tension exprimée en Volt (V)
- I représente l’intensité exprimée en Ampère (A)
Maintenant que l’on connait la puissance électrique de notre vélo électrique regardons comment on obtient un autre élément clé présent dans le langage du vélo électrique : la vitesse de rotation du moteur.
La vitesse de rotation
Formule puissance mécanique: P = C x ω
- P représente la puissance mécanique en Watt(W)
- C représente le couple en Newton mètre (N.m)
- ω représente la vitesse angulaire en radian par seconde (rad.s-1), pour le vélo à assistance électrique, nous parlerons plutôt de vitesse de rotation en tr/min
La conversion est réalisée avec la formule suivante : w = n x 2 x π / 60
- ω représente la vitesse angulaire en radian par seconde (rad.s-1)
- n représente la vitesse de rotation en tr/min ou RPM (Rotation par Minute) du rotor
- Π représente le nombre Pi 3,14….
Cette vitesse de rotation dépend de la tension d’alimentation électrique du moteur, c’est pour cela que dans la caractéristique d’un moteur vous trouverez une valeur de facteur de vitesse ou Kv qui représente la vitesse de rotation du rotor) sous une tension de 1 Volt. Cette valeur est propre à chaque référence de moteur électrique car elle dépend du nombre de spires et diamètre du fil du cuivre utilisés pour réaliser le bobinage de l’enroulement du moteur.
n = Kv x Ub
- n représente la vitesse de rotation du rotor en tr/min ou RPM (Rotation par Minute)
- Kv représente la vitesse de rotation du moteur sous une tension de 1 Volt (tr/min/V)
- Ub représente la tension de la batterie utilisée (en général 36V ou 48V)
Pour les moteurs direct Drive, c’est à dire à entrainement direct, le rapport de réduction est de 1, le stator entraine directement le rotor à l’aide du champ électromagnétique. Pour les moteurs réductés, c’est à dire entrainement du rotor par un étage de réduction fixé sur le stator, pour la plupart des moteurs brushless , la pièce utilisée est un train épicycloïdal avec un rapport de réduction de 1 pour 5. Le rotor fera un tour complet quand le stator fera 5 tours.
llustration d’un moteur réducté

Stator sans train épicycloïdal

Stator sans train épicycloïdal
")
Rotor (rayonné sur la roue)

Stator vue côté bobinage
Illustration d’un moteur Direct drive

La vitesse de déplacement
Et pour finir ce qu’y peut aussi vous intéresser c’est la vitesse de déplacement de votre vélo électrique avec le moteur choisi, pour cela il faudra utiliser la formule suivante :
Vd = ω x r
- Vd représente la vitesse de déplacement de votre véhicule sur terrain plat (m / s ) ou multiplié par 3600/1000 = 3,6 pour avoir le résultat en km/h
- ω représente la vitesse angulaire en radian par seconde (rad.s-1) de la roue
- r représente le rayon de votre roue (m)
Revenons maintenant au monde du vélo électrique, vous avez pu voir sur notre site des moteurs électriques roue avant, roue arrières, moteurs pédaliers avec des valeurs exprimées en Watt (W). Il s’agit donc de la puissance électrique et mécanique maximale admissible par le moteur, nous parlons là de ses caractéristiques physiques, à savoir principalement son bobinage interne en fil de cuivre et la résistance de ce fil.
Exemple :
Après toute cette théorie, un cas pratique pour illustrer toutes ces formules – moteur roue arrière réducté OZO freerider 750W – 1000W
Caractéristiques fournies par le constructeur :
- Kv = 7 tr/min/V
- C = 104 N.m pour une roue de 26’’
- Rr = 5
- Intensité max : 25A (par rapport aux sections de câble de cuivre pour le bobinage)
Nous allons utiliser une batterie de 36V et un contrôleur délivrant un courant maximum de 22A.
Calcul de la puissance mécanique de la roue au couple maximal:
P = C x ω = C x n x 2 π / 60 = C x (Kv x Ub) x 2 π / 60
P = 104 x (7 x 36 ) x 2 x 3,14 / 60
P = 2750 W
Calcul de la puissance électrique maximale en 36V 22A :
Pmax = U x I = 36 x 22 = 792 W
Même cas avec une batterie de 48V et un contrôleur de 25A :
Pmax = U x I = 48 x 25 = 1200 W
Vitesse de déplacement max avec une roue de 26’’ (soit r = 26 x 2,54 /2 = 33cm = 0,33m), un pouce 1’’ vaut 2,54 cm avec une batterie de 36V
Vd = ω x r = 2 x π x r x n / 60 = 2 x π x r x Kv x Ub/ 60
Vd = 2 x 3,14 x 0,33 x 7 x 36 / 60
Vd = 8,7 m / s = 31 km / h
Même cas mais avec une batterie de 48V
Vd = 2 x 3,14 x 0,33 x 7 x 48 / 60
Vd = 11,6 m / s = 41 km / h
Le couple utilisé dans ce calcul est un couple de 104 N.m, il s’agit de la valeur du couple max avec le rotor bloqué, en utilisation le couple est en général plus des 50 N.m.
Exemple de courbe d’un moteur roue arrière réducté
Le couple max d’un moteur est au démarrage et à très faible vitesse, après le couple diminue en fonction de la vitesse, ce phénomène est visible sur la courbe bleue

La courbe verte présente l’efficacité de votre moteur en fonction de vitesse en abscisse (en km/h). La meilleure plage de fonctionnement de votre moteur se situe entre 20 et 40 km/h ou il aura un rendement (efficacité) comprise entre 50% et 85% (rendement maximum de tous les moteurs électriques sans balais). Lors d’une forte montée avec un dénivelé important, votre vitesse va tomber en dessous de 5km/h, le rendement de votre moteur va être inférieur à 25%, si vous utilisez l’assistance au maximum, votre moteur va rapidement chauffé dû à un glissement du stator par rapport au rotor et pourra subir des dommages irréversibles. Le fort courant délivré par le contrôleur sous cette température provoque une fonte de l’isolant de protection des fils de cuivres des 3 phases, les 3 phases sont alors en court-circuit et le moteur ne fonctionne plus. Il n’est pas réparable après ce type de dommage. Pour prévenir ce type de dommage, la plupart des moteurs OZO sont munis de sondes températures, alertant, réduisant ou bloquant l’assistance pour préserver votre kit électrique.

Moteur neuf

Moteur HS suite à un échauffement
La courbe rouge permet d’obtenir la puissance électrique de votre moteur, elle sera atteinte à une vitesse maximale de 35km/h dans cet exemple.
Le graphique ci-après permet de voir la différence avec un moteur et un contrôleur équivalent, la différence de vitesse et de couple entre une batterie en 36V et une batterie en 48V.

Il peut être observé une augmentation de 20 à 30% du couple , de la puissance et de la vitesse. La plage d’efficacité en 48V sera plus importante d’environ 20%.
Illustration d’un Kv différent pour un même moteur (puissance, couple) alimenté avec la même batterie et le même contrôleur

La plage de fonctionnement du moteur avec le Kv de 5 RPM/V (en orange) est très étroite mais le couple est plus important et la vitesse maximale est réduite. Ce type de Kv < 5 RPM/V est utilisé pour des roues dans l’industrie ou l’agriculture ou il y a en général besoin de beaucoup de couple pour tracter de fortes charges et des vitesses de déplacements faibles (allure « piéton ») . La puissance maximale est obtenue à faible vitesse.
Pour les vélos électriques le Kv d’un moteur roue est en général situé autour de 7 RPM / V, offrant une plage de fonctionnement large et des vitesses de fonctionnements du moteur correspondant à la plupart des pratiques du cycle (route, VTT).
Caractéristiques d’une batterie
Pour caractériser une batterie, nous avons besoin de la même loi d’Ohm.
P = U x I
- P représente la puissance électrique en Watt (W)
- U représente la tension en Volt (V), on
- I représente le courant en Ampère (A)
Mais dans le cas d’une batterie, l’intensité n’est pas souvent utilisé, on parle plutôt de la capacité en Ah (Ampère heure). Un ampère heure signifie que la batterie délivre un courant de 1A sur une heure. Pour une meilleure compréhension, nous pouvons assimiler la capacité de la batterie de votre vélo électrique à la capacité d’un réservoir de voiture. La capacité de ce réservoir permet de déterminer une autonomie. Une batterie avec une tension de 36V et une capacité de 12Ah, aura une puissance énergétique de 432 Wh.
La puissance en Watt mesure la puissance électrique d’un appareil (moteur, machine, etc..) alors que le Wattheure est une unité de mesure d’énergie et réfère la consommation de votre moteur. Pour exemple un moteur de 1000W qui fonctionne à cette puissance constante pendant une heure aura consommé 1 kiloWattheure ou 1kWh ou 1000Wh.
La formule de la loi d’Ohm s’applique toujours :
P(Wh) = U x I (Ah) = 36 x 12 = 432 Wh
P (Wh) représente l’énergie
La tension de la batterie n’est pas constante dans le temps, pleinement chargée au repos, la tension de la batterie sera de 42V mais après quelques km la tension sera en charge de 38-39V ; 80% de la capacité de la batterie sera utilisé sur une plage de tension très faible.

La courbe de décharge évolue suivant la valeur du courant débité par la batterie , plus le courant sera important plus la capacité se réduite . Le régime de décharge d’une batterie est représenté par la valeur C. Une batterie de 12Ah est déchargé sous un courant de 12A, sera déchargée sous 1C. Si par contre elle est déchargée avec un courant de 6A, soit 0,5C.
 sur la courbe de décharge")
Influence du courant débité (du régime de décharge) sur la courbe de décharge

Influence de la température d’utilisation de la batterie sur la courbe de décharge
En hiver, vous pouvez observer une baisse d’autonomie de lors de 15 à 20% si vous roulez par une température de 0°C.
Influence de l’âge de votre batterie et du nombre de cycle de charge/décharge sur la capacité de votre batterie. Plus votre batterie vieillie, plus l’autonomie réduit. La durée de vie moyenne de la batterie bien entretenue est d’environ 4 à 5 ans ou environ 600 cycles de charges / décharges.

Laisser un commentaire
Participez-vous à la discussion?N'hésitez pas à contribuer!
Laisser un commentaire
 https://blog.ozo-electric.com/wp-content/uploads/2022/06/9.png
763
1000
JP
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
JP2022-06-29 16:43:292022-06-29 16:47:47Application OZO Batteries
https://blog.ozo-electric.com/wp-content/uploads/2022/06/9.png
763
1000
JP
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
JP2022-06-29 16:43:292022-06-29 16:47:47Application OZO Batteries https://blog.ozo-electric.com/wp-content/uploads/2021/11/bergamont-électrique-avec-kit-BBS01-sacoche-OZO-et-batterie.jpg
690
920
JP
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
JP2021-11-26 14:40:112021-11-26 14:40:14KITS ÉLECTRIQUES – LA SOLUTION D’ÉLECTRIFICATION LA PLUS VERTUEUSE
https://blog.ozo-electric.com/wp-content/uploads/2021/11/bergamont-électrique-avec-kit-BBS01-sacoche-OZO-et-batterie.jpg
690
920
JP
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
JP2021-11-26 14:40:112021-11-26 14:40:14KITS ÉLECTRIQUES – LA SOLUTION D’ÉLECTRIFICATION LA PLUS VERTUEUSE https://blog.ozo-electric.com/wp-content/uploads/2021/11/P2176777.jpg
690
920
JP
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
JP2021-11-10 15:26:142021-11-10 15:26:15Les différentes aides à l’achat d’un kit électrique pour vélo
https://blog.ozo-electric.com/wp-content/uploads/2021/11/P2176777.jpg
690
920
JP
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
JP2021-11-10 15:26:142021-11-10 15:26:15Les différentes aides à l’achat d’un kit électrique pour vélo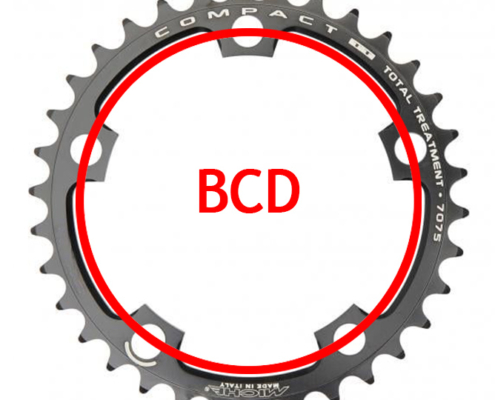 © 2020 OZO ELECTRIC
https://blog.ozo-electric.com/wp-content/uploads/2020/08/BCD.jpg
650
668
JP
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
JP2020-08-12 18:39:322020-08-13 14:52:21Mesurer le BCD (diamètre de fixation) du plateau de son vélo
© 2020 OZO ELECTRIC
https://blog.ozo-electric.com/wp-content/uploads/2020/08/BCD.jpg
650
668
JP
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
JP2020-08-12 18:39:322020-08-13 14:52:21Mesurer le BCD (diamètre de fixation) du plateau de son vélo https://blog.ozo-electric.com/wp-content/uploads/2021/11/P8217382.jpg
323
430
JP
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
JP2020-06-25 14:41:402022-09-27 15:29:26Batterie Vélo Électrique : Estimation De l’Autonomie
https://blog.ozo-electric.com/wp-content/uploads/2021/11/P8217382.jpg
323
430
JP
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
JP2020-06-25 14:41:402022-09-27 15:29:26Batterie Vélo Électrique : Estimation De l’Autonomie https://blog.ozo-electric.com/wp-content/uploads/2023/05/un38-3_v3.jpg
500
500
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-26 11:52:242023-05-26 11:53:32Norme I4UN38.3
https://blog.ozo-electric.com/wp-content/uploads/2023/05/un38-3_v3.jpg
500
500
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-26 11:52:242023-05-26 11:53:32Norme I4UN38.3 https://blog.ozo-electric.com/wp-content/uploads/2023/05/6181859.jpg
938
1000
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-26 11:40:322023-05-26 11:40:32Comment calculer l’autonomie d’une batterie : explication de l’énergie embarquée
https://blog.ozo-electric.com/wp-content/uploads/2023/05/6181859.jpg
938
1000
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-26 11:40:322023-05-26 11:40:32Comment calculer l’autonomie d’une batterie : explication de l’énergie embarquée https://blog.ozo-electric.com/wp-content/uploads/2023/05/eco-circulaire-1.png
742
800
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-26 11:33:492023-05-26 11:33:50L’économie circulaire
https://blog.ozo-electric.com/wp-content/uploads/2023/05/eco-circulaire-1.png
742
800
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-26 11:33:492023-05-26 11:33:50L’économie circulaire https://blog.ozo-electric.com/wp-content/uploads/2023/05/chargeur.png
800
800
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-26 10:12:022023-05-26 10:25:33Comment charger une batterie au lithium et quelles sont les différentes possibilités ?
https://blog.ozo-electric.com/wp-content/uploads/2023/05/chargeur.png
800
800
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-26 10:12:022023-05-26 10:25:33Comment charger une batterie au lithium et quelles sont les différentes possibilités ? https://blog.ozo-electric.com/wp-content/uploads/2023/05/zyro-image.jpg
872
1156
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-26 09:53:282023-05-26 09:53:29Quels sont les risques d’acheter une batterie lithium sur un site chinois ?
https://blog.ozo-electric.com/wp-content/uploads/2023/05/zyro-image.jpg
872
1156
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-26 09:53:282023-05-26 09:53:29Quels sont les risques d’acheter une batterie lithium sur un site chinois ? https://blog.ozo-electric.com/wp-content/uploads/2023/05/voiture.png
800
800
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-25 17:03:162023-05-26 10:32:34Est-ce qu’un véhicule électrique est écologique ? Est-ce un achat éco-responsable ?
https://blog.ozo-electric.com/wp-content/uploads/2023/05/voiture.png
800
800
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-25 17:03:162023-05-26 10:32:34Est-ce qu’un véhicule électrique est écologique ? Est-ce un achat éco-responsable ? https://blog.ozo-electric.com/wp-content/uploads/2023/05/Batteries-cadres-14Ah-17Ah-24Ah.jpg
328
650
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-25 16:46:002023-05-30 09:30:02Quelle est la durée de vie d’une batterie au lithium ?
https://blog.ozo-electric.com/wp-content/uploads/2023/05/6181859.jpg
938
1000
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-25 16:24:312023-05-30 16:53:36Comment entretenir sa batterie ?
https://blog.ozo-electric.com/wp-content/uploads/2023/05/Batteries-cadres-14Ah-17Ah-24Ah.jpg
328
650
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-25 16:46:002023-05-30 09:30:02Quelle est la durée de vie d’une batterie au lithium ?
https://blog.ozo-electric.com/wp-content/uploads/2023/05/6181859.jpg
938
1000
Valentine OTT
https://blog.ozo-electric.com/wp-content/uploads/2022/04/Plan-de-travail-1-300x138.png
Valentine OTT2023-05-25 16:24:312023-05-30 16:53:36Comment entretenir sa batterie ? © 2020 OZO ELECTRIC
© 2020 OZO ELECTRIC © 2020 OZO ELECTRIC
© 2020 OZO ELECTRIC
bjr,
Article très profitable (donc à maintenir en ligne)= on voit le concret des formules par l’exemple.
Toutefois, je reste sur un manque : là il s’agit d’un moteur reducted 1:5 et vous ne traitez pas ce Rr= 5
c-à-d monter par l’exemple son incidence (bien que ce soit sa sortie seule qui a des conséquence sur la suite, le couple max en sortie, le RPM, etc
Le Kv n’est-il pas donné pour un régime de rotation …à vide ? Ici le moteur OZO Freerider est à 7 tr/min/V soit 330 RPM sous 48V (ce qui me parait lent !). Cette constante permet de calculer la Vitesse maxi du moteur. Ici env. 45 km/h en roue AR 29 ‘’ …mais à vide (si on roule plus vite, c’est grâce au cycliste qui « en rajoute », pas au moteur). Dès qu’il y a de la charge, le moteur tourne moins vite, mais de combien ? (et avec combien de couple en plus ?)
Et à cette vitesse max, est-ce que le couple tend vers 0 puisque + le moteur tourne vite, – il a de couple ?
D’autre part, est-ce que ce Kv permet de déduire d’autre(s) caractéristique(s) moteur ?
Comme par exemple, j’ai lu par ailleurs « Couple développé = Courant divisé par Kv ( C= I* Kc) ». Si c’est le cas, puisque si j’ai bien compris le contrôleur augmente le courant pour avoir plus de puissance moteur (P=U*I), on peut écrire Couple (Nm)= Intensité courant (Ampère) / 7 (fonction linéaire y=ax) mais la donnée d’alimentation en 48V n’interviendrait pas?
Merci d’éclaircissements ou d’un sujet Blog à part entière sur ‘’Commente créer de la puissance pour avancer ?’’ Slts
Bonjour, Oui vous avez raison, dans cet article nous ne tenons pas compte de rapport de réduction de 1:5 du moteur freerider car le but est de donner le calcul de la vitesse de rotation en sortie moteur afin de pouvoir calculer une vitesse linéaire du vélo ou autre engin sur lequel serait installé ce moteur.
Pour la formule du couple, cela sera abordé dans une future mise à jour, mais votre formule est bonne avec Kc étant la constante de couple.
Nous essaierons de rendre cet article le plus complet possible par la suite dès que nous aurons un peu pkus de temps à y consacrer.
merci pour votre retour
Vous dites que la formule du ‘’Couple= Courant / 7 ‘’ est bonne (C= I* Kc). C’est donc une fonction simple où le couple progresse de manière linéaire avec le courant, mais j’y voit ‘’quand même’’ 2 problèmes :
1. À vide, là je pense que la vitesse de rotation est maximale et le couple est sans doute quasi nul et pourtant le moteur consomme un certain courant appelé I0. Donc pour toute la plage entre courant= 0 et I0, on a du courant et pas de couple.
2. Et pour des courants supérieurs à I0, par exemple d’après la fiche technique à l’ Intensité max 25A, n’est-ce pas là (à ce courant maxi) qu’on devrait avoir le couple max de 104 N.m indiqué dans cette même fiche technique (en roue 26’’ que d’ailleurs la formule n’a pas l’air d’intégrer) ou les 70 N.m de vos graphiques de moteur proches ?
On trouve un résultat de la formule loin du compte avec 25 / 7= 3,57 N.m Alors qu’est-ce qui ne va pas dans ce raisonnement ou équation, manquerait-t-il un coefficient multiplicateur ou c’est la formule qui est (en fait) fausse?
Et pour le fait que ce soit un modèle Reducted, normalement pour les calculs globaux, je dirais « qu’on n’a pas à le savoir » (mais tout en tenant compte de l’incidence réduction, contrairement à ce que vous écrivez). En entrée, on a une tension et un courant. Et en sortie, la roue est rayonnée sur un flasque qui a une vitesse de rotation et un couple « comme tout moteur roue ». Et pour l’utilisateur, c’est le résultat au final qui compte = en sortie moteur, qu’on ait un modèle Réducté ou Direct Drive. C’est-à-dire qu’on n’a pas à multiplier dans un cas et pas dans l’autre, les couple et vitesse de rotation résultants par un quelconques coefficient ; les données fournies doivent être directement comparables
Q. Je ne comprends pas v/ calcul de l’exemple ‘’Puissance mécanique de la roue au couple maximal’’ donnant 2750W.
S’il est vrai (et c’est vrai) que P= C * oméga (vitesse angulaire en rad/s),
si vous parlez de « Puissance moteur à son Couple maxi » alors il faut, je pense, considérer son Régime moteur à ce moment-là ; c-à-d « à combien le moteur tourne lorsqu’il est à son couple maximum ».
Je remarque que pour vous, ça serait à Kv * Ub= 252 tr/min, soit en fait à sa vitesse de rotation maxi !
…tandis que vous écrivez un peu plus loin « Le couple max d’un moteur est au démarrage et à très faible vitesse, après le couple diminue en fonction de la vitesse…». Donc le couple moteur devient nul à forte rotation (+ le moteur tourne vite, – il a de couple). Donc on ne peut pas avoir 104 N.m à 252 tr/min ; on a plutôt 0 non ?
Pour une Puissance max 1250W indiquée dans la fiche technique, je ne vois pas à quoi correspond vos 2750W trouvés… et le contrôleur 25A préconisé ne cramerait pas avec une batterie 36 ou 48V ? une clarification…
Le diamètre de la roue influence sur…
Votre formule » Couple= Circonférence / Vitesse de rotation »
m ‘étonne car le couple en sortie moteur ne dépend pas directement de la taille de la roue ; en tout cas sauf si vous parlez du « Couple résistant » , lequel serait égal au couple moteur (et en situation de vitesse constante / système à l’équilibre, pas d’accélération, pas de décélération).
Par contre, la notion de « Poussée » le serait et il est plus pratique de parler de poussée à la roue (mais son unité ne nous est pas familière) pour estimer la capacité d’ascension d’un véhicule (approximativement = Poids à transporter x Pourcentage de pente). Et là, la propulsion augmente naturellement lorsqu’on utilise des roues plus petites
Bonjour,
Oui votre raisonnement est bon, mais comme précisé à un précédent commentaire, cet article est une première approche pour aider à la compréhension globale pour un public débutant. Cependant pour les initiés, une mise à jour beaucoup plus détaillée sera en ligne prochainement.
Bjr, Sur votre 1er graphique , vous écrivez que la meilleure plage de fonctionnement du moteur (rendement de 50 % au maxi 85%) se situe entre 20 et 40 km/h. Moi, en regardant ce graphique, je dirais plutôt de 10 km/h à 48 km/h avec ce seuil de 50% ; voire même la plage entière de 0 à 50 km/h avec les explications suivantes:
1. Vous ne mentionnez pas la plage 40 à 48 km/h qui pourtant est intéressante car la consommation en entrée baisse (le contrôleur tire moins sur la batterie) et on bénéficie d’un déplacement rapide (évidemment, à ce moment-là, on ne peut pas le faire sur forte pente)
2. Et en-dessous de 10 km heure, le rendement est certes médiocre mais la consommation en entrée se réduit …d’après votre courbe Puissance (donc ça ne pompe pas forcément beaucoup la batterie, d’autant plus que ça ne dure généralement pas longtemps une côte) tout en ayant un couple important. On peut grimper de fortes pentes ; ce qui d’ailleurs est paradoxal (la faible consommation) car normalement à Couple max, on a Courant max
3. Toutefois , je vous accorde qu’ entre 10 et 20 km heure , bien que le rendement soit supérieur à 50 %, cette plage de fonctionnement n’est pas fameuse car on consomme quand même le courant Maximum en entrée (batterie) c-à-d. autant qu’après mais on bénéficiera de moins de puissance utile
Alors faible consommation à basse vitesse …ou pas vraiment?
Bonjour,
A faible vitesse, tout dépend de la charge exercée sur le moteur.
Si vous êtes sur le plat, vous pouvez rouler à 5km/h sans problème de manière constante puisque le courant dans l’induit sera de l’ordre de 3A.
Cependant si vous roulez à 5Km/h dans une pente de 15% tout en sollicitant le courant max, il va y avoir une montée en température rapide du bobinage moteur puisque d’une part le moteur va tourner dans une plage de rendement mediocre et d’autre part, la vitesse d’avance ne sera pas assez rapide pour créer un refroidissement dynamique du moteur.
Concernant la consommation, celle-ci sera directement liée au courant envoyé dans le moteur par le controleur , qui sera fonction de la charge exercée sur le moteur.
Bjr, Oui mais vous ne répondez pas pour la courbe Puissance qui paraît curieuse. Vous dites que la consommation est fonction de la charge du moteur …mais cette dimension n’apparaît pas sur les courbes.
Reprenons votre exemple de I= 3A à 5 km/h sur du plat.
À cette vitesse, je relève sur le graphique Puissance restituée= 300 watts et Rendement= 37%. Ce qui donne en entrée Puissance absorbée= Puiss. restit. 300 / Rendement 0,37= 810W.
Comme P= U*I alors U= P/I = 810/3= 270 volts …avec une batterie 48V. Alors je me demande bien pourquoi vous seriez obligé d’augmenter (voire énormément) la tension aux bornes du moteur (donc amplifier la tension batterie), plus la vitesse baisse dans le cas d’une charge moteur faible, ici sur du plat ?
Sans obligation, cela me paraît être de la puissance, donc de » l’autonomie batterie consommée » pour rien !
Le même calcul dans votre cas de montée à 15 % donne :
Courant dans l’induit= I max= 25A. Comme la Puissance absorbée est tjs de 810W à 5 km/h et U= P/I alors U= 810/ 25= 32 volts. Là, vous semblez donc réduire la tension d’alimentation (soit faire l’inverse du cas précédent), c’est ça ?
PS: La courbe Couple semble également bizarre : à 5 km/h elle donne un couple de 70 N.m ; cela me paraît beaucoup lorsqu’on est dans le premier cas précédent du plat ! À moins qu’avec une telle poussée, le vélo va accélérer puisqu’il y a une faible résistance à l’avancement, donc la vitesse va augmenter… et le couple baisser (d’après le graphique). Mais n’avez-vous pas écrit » qu’on pouvait rouler à 5 km/h de manière constante »? …
Bonjour, J’ai longtemps été intrigué par votre formule énoncée juste avant le premier graphique
» Couple = P (Périmètre de la roue) divisée par ω (Vitesse angulaire) »
• Je me demandais comment, à une certaine vitesse de déplacement donnée, tous les vélos moteur roue arrière de même diamètre pouvait avoir le même couple … donc quel que soit donc leur moteur (ses spécificités techniques propres n’intervenant pas dans l’équation)!
• De plus, ce couple serait (à une vitesse donnée) fixé c-à-d. seulement proportionnel à la taille de la roue. La pente de la fonction linéaire y=a/x a pour pente « 30 x diamètre roue » (ω en tr/min). Par exemple en 26 pouces, si votre moteur peut tourner à 100 RPM (déplacement vélo 12,5 km/h), vous aurez toujours un couple de 0,2
• Et si on regarde les unités de la formule, le N.m du couple équivaudrait (si unités SI) au mètre/ radian/ seconde?
Quelque chose doit m’échapper…
Et pour la courbe des valeurs Couple fonction de la Vitesse, ça ne donne pas autant d’amplitude qu’on connaît, la vitesse se réduisant. C’est une droite penchée vers la droite tendant vers 0 (ça c’est bon) avec à gauche 10km/h (80rpm) donnant 0,25N.m ; 5km/h (40rpm) donne 0,5N.m
Le couple augmente, moins le moteur tourne, normal, mais le couple n’est pas encore bien terrible. D’après la formule, on a du mal à atteindre 1 N.m (pour 70N.m annoncé par ailleurs)…
Puis en conjuguant avec l’autre formule « Puiss= Couple x Vitesse rotation », alors
C= P/ w= Circonférence/ w. Donc « P= Circonférence » et des watts sont des mètres!
Bonjour,
Merci pour votre retour, il y a en effet une erreur dans cette formule.
une mise à jour complète de cet article sera en ligne bientôt avec de nombreux compléments d’informations.